Muovikärjen kelan heilumisrajakytkin

-

Kestävä kotelo
-

Luotettava toiminta
-

Parannettu elämä
Tuotekuvaus
Renew'n RL8-sarjan miniatyyrirajakytkimet tarjoavat paranneltua kestävyyttä ja vastustuskykyä vaativiin olosuhteisiin, ja niiden mekaaninen käyttöikä on jopa 10 miljoonaa toimintoa. Tämä tekee niistä ihanteellisia kriittisiin ja raskaisiin sovelluksiin, joissa tavalliset peruskytkimet eivät riitä. Joustavan jousisauvan ansiosta kelan heilumisrajakytkimiä voidaan käyttää useisiin suuntiin (paitsi aksiaalisiin suuntiin), mikä huomioi virheellisen kohdistuksen. Ne sopivat täydellisesti eri kulmista lähestyvien kohteiden havaitsemiseen. Saatavilla on muovikärkisiä ja lankakärkisiä versioita erilaisiin sovelluksiin.
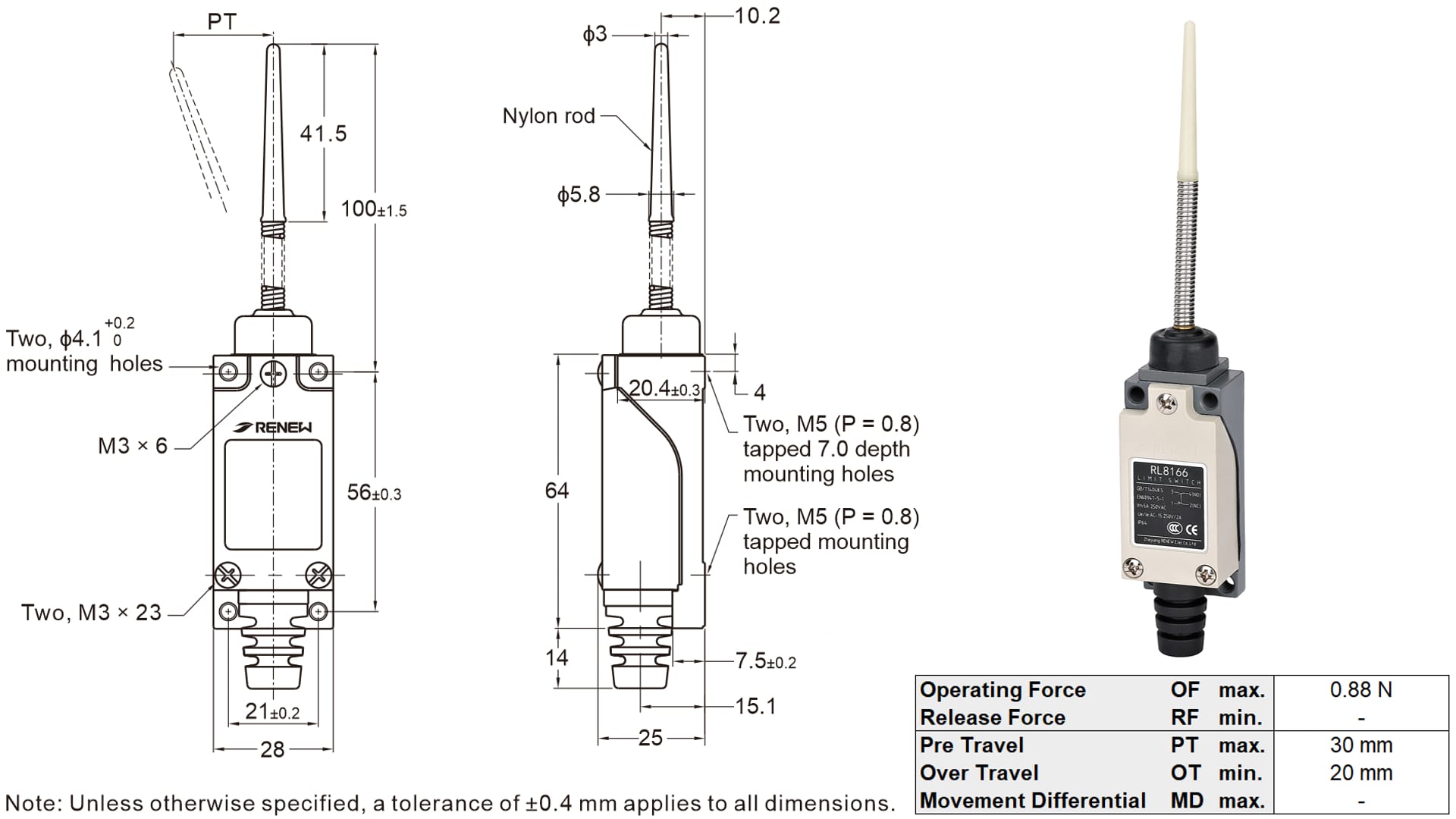
Mitat ja käyttöominaisuudet
Yleiset tekniset tiedot
| Ampeeriluokitus | 5 A, 250 VAC |
| Eristysvastus | 100 MΩ vähintään (500 VDC:n jännitteellä) |
| Kosketusvastus | 25 mΩ enint. (alkuarvo) |
| Läpilyöntilujuus | Saman napaisuuden omaavien kontaktien välillä 1 000 VAC, 50/60 Hz 1 minuutin ajan |
| Virtaa johtavien metalliosien ja maan välillä sekä kunkin liittimen ja virrattomien metalliosien välillä 2 000 VAC, 50/60 Hz 1 minuutin ajan | |
| Tärinänkestävyys toimintahäiriöiden varalta | 10–55 Hz, 1,5 mm:n kaksinkertainen amplitudi (toimintahäiriö: enintään 1 ms) |
| Mekaaninen käyttöikä | Vähintään 10 000 000 toimintoa (120 toimintoa/min) |
| Sähköinen käyttöikä | Vähintään 300 000 toimintoa (nimellisresistanssikuormituksella) |
| Suojausaste | Yleiskäyttöinen: IP64 |
Hakemus
Renew'n pienoisrajakytkimillä on ratkaiseva rooli erilaisten laitteiden turvallisuuden, tarkkuuden ja luotettavuuden varmistamisessa eri aloilla. Tässä on joitakin suosittuja tai potentiaalisia sovelluksia.

Varastologistiikka ja -prosessit
Nykyaikaisissa varastoissa ja tehtaissa näitä rajakytkimiä voidaan käyttää pakkauskoneissa kuljettimella liikkuvien epäsäännöllisen muotoisten pakkausten havaitsemiseen. Joustava tanko taipuu pakkauksen muotoon ja laukaisee kytkimen. Niitä voidaan käyttää myös robotiikassa ja automatisoiduissa järjestelmissä robottikäsivarsien tai liikkuvien osien päätyasemien havaitsemiseen, jotka eivät välttämättä ole aina täysin kohdakkain.













